Warum ein Direktantrieb für ein astronomisches Teleskop
|
Welche Vorteile bringt mir dieses System gegenüber konventionellen Antriebssystemen und kann man damit mehr ausser Fotografieren?
Warum einen Direktantrieb?
Ein Antrieb mit einem mechanischen Getriebe hat immer einen ungleichmässigen, von der theoretischen Periode abweichenden
Lauffehler. Man muss sich einfach vor Augen halten dass eine Bogensekunde bei einem Zahnrad von 200 mm Nenndurchmesser einen
Zahnflankenfehler von 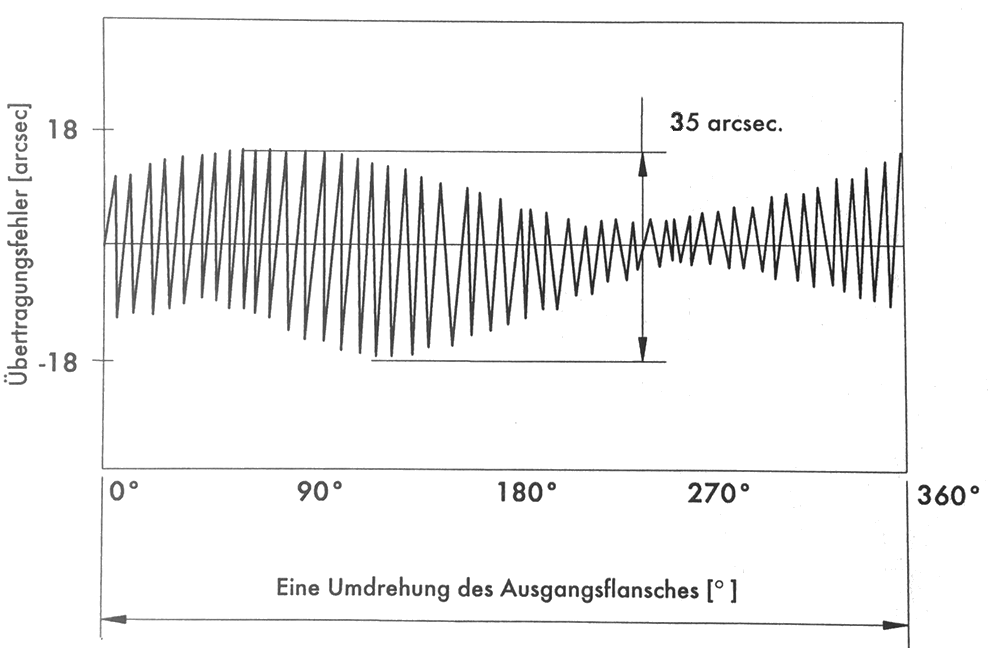
Ein Direktantrieb hat kein Getriebe - er kann diese Fehler also gar nicht haben. Man könnte nun argumentieren, dieser
erlaubt „eine Nachführung im Sub-Bogensekundenbereich ohne Fehler“. Aber stimmt das so? Auch nicht, denn einerseits
ist der Antrieb nur so genau wie es die Encoder selber zulassen (diese haben auch einen Fehler) und die Steuerelektronik das regeln
kann. Andererseits kommen noch andere mechanischen Fehlern hinzu. Die wichtigsten sind die Winkeltreue des Achsystems wie auch der
Optik sowie die Durchbiegung des ganzen Systemes. Weiter kommt hinzu, dass die Encoder nicht nur selber einen Fehler haben sondern
verschiedenste Einbaufehler sich ebenfalls entsprechend auswirken. Dabei unterschätzt man die Wirkung von einem Verzug von
 Die Grafik zeigt den gemessenen realen Fehler eines Encoders - die Abweichung beträgt gut +/- 5 Bogensekunden, bzw. im schlechtesten Fall schon mal 1" in 5 Zeitminuten. Also versucht man die Summe der vielen kleinen Fehler zB. mit einem komplizierten Pointing Modell mit vielen Messpunkten möglichst genau zu modelieren – verändert man allerdings ein Detail am System, stimmt das Modell schon wieder nicht mehr. Nun, man kann natürlich das ganze mechanische System so starr machen, dass sich Verbiegung praktisch nicht mehr auswirkt. Leider können das aber die wenigsten realisieren weil einerseits die Platzverhältnisse nicht reichen für die Wunschgrösse der Optik und/oder die ganze Sache schlicht zu schwer würde. Würde, so könnte man in der Praxis bei einem so schweren System mit einem gut dimensionierten Reibradantrieb eine anfangs fast ebenso gute Nachführung realisieren. Nur eben - wer hat schon die Möglichkeit ein vielleicht tonnenschweres Teleskopssystem schnell in seine Gartensternwarte zu stellen. Nun, es geht auch anders, viel einfacher: mit nur vier Messpunkten (Sterne oder "plate solve") kann die SkyWaker Steuerung ganz unkompliziert eine Vielzahl an Fehlern automatisch erfassen und laufend dynamisch korrigieren. Einfach, schnell und ohne PC.
Bogensekundengenaue Nachführung Grosse Probleme haben mechanische Antriebe weiter immer dann, wenn der Antrieb einen Scheitelpunkt der Balance durchläuft, das Teleskop also quasi von der einen Zahnflanke auf die andere fällt. Das gleiche passiert bei Richtungswechseln in der Deklinationsachse. Ein Bild in dem Bereich ist dadurch auch mit dem besten Guidingsystem futsch. Nicht so bei einem Direktantrieb - er kennt solche Probleme gar nicht. Hier kommt die Stärke des Direktantriebes voll zum Zug: dieses erreicht eine wirklich unerreicht hohe Laufruhe und folgt subbogensekundengenau dem Encoder - mit Abweichungen von in der Regel von einem Bogensekunkundenbruchteil je Zeitminute. Alle anderen Restfehler (Refraktion, Durchbiegung usw.) die ja langsam Auftreten, können mit einem Autoguider problemlos kompensiert werden, idealerweise wenn die Integrationszeit 10 Sekunden oder auch länger beträgt. So wird auch nicht der Luftunruhe hinterher korrigiert.
Belastungstolerant und praktisch Abnutzungsfrei Hier kommt natürlich die Fähigkeit der Steuerelektronik zum Zug, die innert Sekundenbruchteilen die Lage des Teleskopes erfassen und entsprechend regeln muss. So ist es möglich, mit einer relativ leichten, kompakten Montierung auch grosse, deutlich schwerere Teleskope ruhig und genau zu steuern. Dies erlaubt den Betrieb in relativ engen Sternwarten perfekt. Kein Spiel bei mechanischen Belastungen am Teleskop / Auszug - das System regelt auf das Zielobjekt aus.

Das vielleicht wichtigste Argument ist, dass diese Steuerung das visuelle Beobachten am Teleskop mit all seinen Umständen optimal unterstützt: egal ob man rüttelt beim Fokussieren oder die Achsen gleich richtig wegdrückt - der Antrieb regelt immer sauber mit und hält das Teleskop schwingungsarm ruhig am Ort. Oder gibt mal nach wenn man zu stark wegdrückt - in jedem Fall zentriert das Telekop wirklich bogensekundengenau zur Zielkoordinate zurück. Weder kann man so etwas beschädigen, noch die Elektronik aus der Ruhe bringen noch wird zu viel Strom verbrannt - noch wird man je so etwas wie Spiel spühren. Ein Okularwechsel, mag er noch so ruppig sein, wird nie mehr zum Verlust der Blickrichtung führen.
Die Steuerelektronik macht den Unterschied Deshalb haben wir das Augenmerk bei der Entwicklung der SkyWalker Steuerung darauf gelegt, dass diese die Vorteile eines solchen Systemes voll ausschöpft und den Beobachtungsspass in einer neuen Dimension erlaubt: Die einmalige modellbasierende Regelung der Motoren erfolgt ink. der permanenten Pointingkorrektur mit einer Taktrate von einigen 100 mal je Sekunde - ein ganz neues Gefühl, wenn Sie am Teleskop rütteln. Der elektronischen Lagekorrektur ist es also recht egal wie die Belastung der Montierung ist, ob ein grosses oder kleines Teleskop gerade zum Einsatz kommt und dieses ausbalanciert ist. Die Steuerung regelt das sauber ohne Aufschwingen aus. Also keine Beschädigungsgefahr für Mechanik und Tubus, das eingestellte Objekt bleibt einfach genau dort wo es positioniert war - Pixel für Pixel, ohne das berüchtigte Aufschwingen der Motoren bein variabler Bestückung des Teleskops.
Unser Direktantrieb bietet also nicht nur dem Astrofotografen Vorteile, auch visuelle Beobachter werden sofort die Vorteile spühren und nicht mehr missen wollen. Er lässt eine Montierung zu, die im Verhältnis zur Tragkraft geadezu leicht ist und sich kompakt macht in der immer zu engen Sternwarte. Der SkyWalker Antrieb - eine neue Dimension in der Beobachtung der Sterne.
 Der Direktantrieb: ein Antrieb für die Zukunft der Astronomie.
|
AOKswiss online · Montierungen
Copyright © by AOK, Astrooptik Kohler. Alle Rechte vorbehalten.
Letzte Änderung: 27. September 2018, Webmaster