Messwerte
Die verbauten Hohlwellenencoder von Renishaw haben eine reale Teilung von 8191 "Teilstrichen", diese werden
wiederum soweit aufgeteilt dass jeder Teilstrich durch ein Intereferenzverfahren nochmals aus 8192 messbaren
Abschnitten besteht (analog eines Nonius einer mechanischen Messlehre). Daraus ergibt sich dass die
Encoderauslesung sich mit einer Periode von rund 10.52 Sekunden "wiederholt" und eine effektive Auflösung
von 0.02 Bogensekunden hat. Eine typische Gesamtgenauigkeit über 360° gemessen eines solchen Encoders
sieht wie folgt aus:
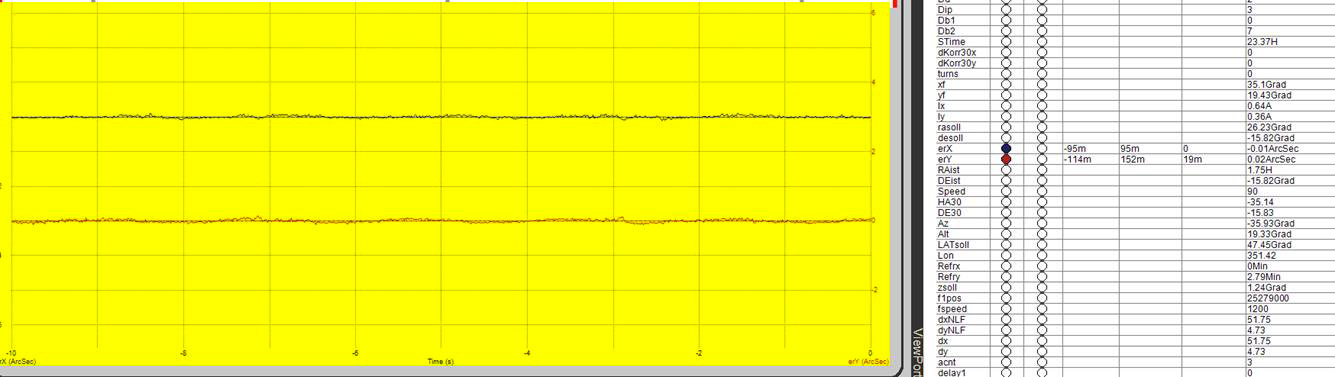
Die Motortreiber lassen nun den jeweiligen Motor mit einer hohen Genauigkeit dem Encoder folgen, bei optimaler Einstellung
mit einem Fehler von 1/20 Bogensekunde oder weniger. Dies kann man jederzeit selber nachprüfen und sieht dann so aus:
Aber wie genau werden die Teilstriche aufgeteilt deren Ausleselverhalten letztlich die Motoren folgen? Dies kann man
wie den Periodenfehler einer Montierung mit Schneckenrad an einem Stern messen. Allerdings ist hier der Fehler
durch das Seeing um ein vielfaches höher als der Auslesefehler des Encoders!
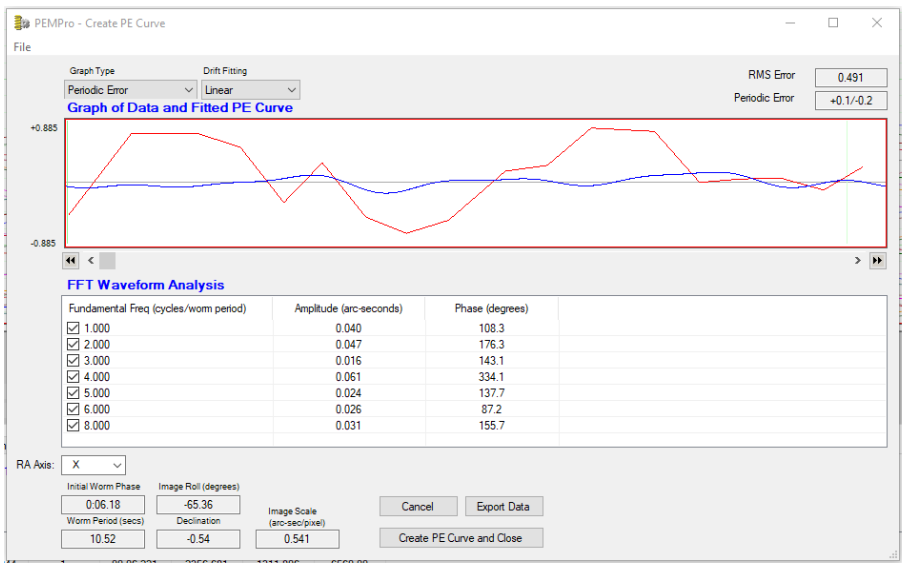
Um ein möglichst genaues Resultat zu erhalten haben wir insgesamt 100 Durchläufe mit einem Raster von
einer Sekunde mit PEMpro aufgezeichnet und ausgewertet. Das Resultat aus über 1000 Messungen (keine Aussortierung von
Einzelresultaten!) lässt sich sehen: während der mittlere Fehler durch das Seeing wie zu erwarten mit +/- ∼1 Bogensekunde
deutlich ist (rote Linie), beträgt der gemittelte Fehler aller 100 Perioden nie mehr als 0.2", egal welchen Auswertungsfilter
man anwendet (blaue Linie) . Der Lauffehler ist also deutlich kleiner als Fehler durch das Seeing! Deshalb kann man auch für
anspruchsvollste Aufnahmen ruhig mit 10 oder 20 Sekunden Belichtungszeit für den Guider arbeiten um Driftbewegungen abzufangen
(Aufstellungs- und Winkelfehler, Encoderdrift, Refraktion, Absinken und Durchbiegung von Stativ bis Tubus, Optikshifting usw.) ohne
dass man dadurch relevante Nachführfehler bekommen würde.
Daraus sieht man wie genau die Montierung dem Lauf der Gestirne folgen kann. Im Prinzip könnte man so auch auf einen Guider
verzichten. Allerdings zeigt sich in der Praxis immer wieder dass noch andere Faktoren hinzu kommen die eine allmähliche Drift
erzeugen können. Aber diese ist immer sehr langsam und so kann man ruhig 10 oder 20 Sekunden Belichtungszeit für die
Guiderkamera wählen. Dann wird auch nicht mehr der Luftunruhe hinterher gefahren und man erreicht Halbwertsbreiten an Sternen
von bis unter einer Bogensekunde.
|